#include "cont_attitude_FOF_SO3_continuous.h"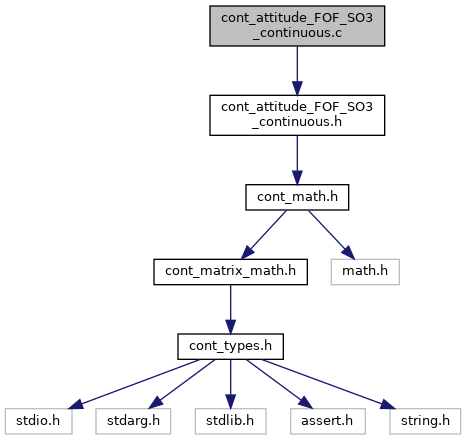
Go to the source code of this file.
Functions | |
| int | update_attitude_FOF_SO3_continuous_measurements (con_state_qw_fof_t *controller, matrix_double_t *y0m, matrix_double_t *y1m, matrix_double_t *y2m, matrix_double_t *y3m) |
| Help function used to update the measurements in the controller struct. More... | |
| int | update_attitude_FOF_SO3_continuous (ref_state_qw_t *reference, dyn_state_qw_t *state, con_state_qw_fof_t *controller, double dt) |
| Update using the continuous filtered outpot feedback (FOF) on SO(3) More... | |
| int | attitude_FOF_SO3_continuous_simulate_observer (matrix_double_t *Qm, matrix_double_t *Wm, matrix_double_t *deltaQm, matrix_double_t *deltaWm, double dt) |
| Help function to simulate the attitude observer dynamics. More... | |
| int | attitude_FOF_SO3_continuous_cross_terms (matrix_double_t *YAm, matrix_double_t *YBm, matrix_double_t *gainm, matrix_double_t *outm) |
| Help function used to compute the innovation terms in the controller. More... | |
Function Documentation
◆ attitude_FOF_SO3_continuous_cross_terms()
| int attitude_FOF_SO3_continuous_cross_terms | ( | matrix_double_t * | YAm, |
| matrix_double_t * | YBm, | ||
| matrix_double_t * | gainm, | ||
| matrix_double_t * | outm | ||
| ) |
Help function used to compute the innovation terms in the controller.
The gains are stored in an input array on the form gain = [k1,...,kN], and the directions are similarly stored as YA = [yA1,...,YAN], and YA = [yB1,...,YBN], and the function evaluate sthe weighted cross-product sum on the form.
out = sum_{i = 1}^N k_i * S(yAi) * yBi
where S(*) denotes the hat map on SO(3), while checking for dimensionality errors and verifying that the gains are postrictly positive.
- Parameters
-
[in] YAm - Input directions (3xN) dimensional [in] YBm - Input directions (3xN) dimensional [in] gainm - Controller gains (1xN) dimensional [out] outm - Function output,
- Returns
- status - 1 if successful, 0 otherwise
Definition at line 293 of file cont_attitude_FOF_SO3_continuous.c.
◆ attitude_FOF_SO3_continuous_simulate_observer()
| int attitude_FOF_SO3_continuous_simulate_observer | ( | matrix_double_t * | Qm, |
| matrix_double_t * | Wm, | ||
| matrix_double_t * | deltaQm, | ||
| matrix_double_t * | deltaWm, | ||
| double | dt | ||
| ) |
Help function to simulate the attitude observer dynamics.
d(Q)/dt = Q * [ deltaQ / 2 ]_{SU(2)}^{\^} d(W)/dt = deltaW
For simplicity, take a first order euler method and let
Q(t + dt) = Q(t) * expm(dt * [ deltaQ(t) / 2 ]_{SU(2)}^{\^}) W(t + dt) = W(t) + dt * deltaW(t)
- Parameters
-
[in] Qm - Attitude configured on SU(2) [in] Wm - Attitude rates configured on R^3 [in] deltaQm - Time derivative of the signal Qm (one parameter group, R^3) [in] deltaWm - Time derivative of the signal Wm (on R^3) [in] dt - Propagates the continuous time dynamics dt [s] ahead a first order euler method. This should eventually be replaced by a Crouch-Grossman method.
- Returns
- status - 1 if successful, 0 otherwise
Definition at line 245 of file cont_attitude_FOF_SO3_continuous.c.
◆ update_attitude_FOF_SO3_continuous()
| int update_attitude_FOF_SO3_continuous | ( | ref_state_qw_t * | reference, |
| dyn_state_qw_t * | state, | ||
| con_state_qw_fof_t * | controller, | ||
| double | dt | ||
| ) |
Update using the continuous filtered outpot feedback (FOF) on SO(3)
This function takes the states of the reference dynamics in "reference" structure, as well as the current states of the system in the "state" structure, and the controller settings/memory in the "controller" structure, and updates the torque fields in the controller for actuation, as well as the observer states and relevant distances based on this information.
- Parameters
-
[in] reference - State of the reference dynamics [in] state - State of the system dynamics [in,out] controller - State of the controller, updated by the call [in] dt - Time since the previous controller update [s]
- Returns
- status - 1 if successful, 0 otherwise
Definition at line 44 of file cont_attitude_FOF_SO3_continuous.c.
◆ update_attitude_FOF_SO3_continuous_measurements()
| int update_attitude_FOF_SO3_continuous_measurements | ( | con_state_qw_fof_t * | controller, |
| matrix_double_t * | y0m, | ||
| matrix_double_t * | y1m, | ||
| matrix_double_t * | y2m, | ||
| matrix_double_t * | y3m | ||
| ) |
Help function used to update the measurements in the controller struct.
This is only required when calling the function from Julia, where the structs are immutable, but for safety reasons, it is best to set the measurements using this function instead of direct manipulation of the controller struct memory.
- Parameters
-
[in] controller - The Controlle robject [in] y0m - Gyroscopic measurement [in] y1m - Directional measurement, corresponding to v1 [in] y2m - Directional measurement, corresponding to v2 [in] y3m - Directional measurement, corresponding to v3
- Returns
- status - 1 if successful, 0 otherwise
Definition at line 10 of file cont_attitude_FOF_SO3_continuous.c.
