#include "cont_math.h"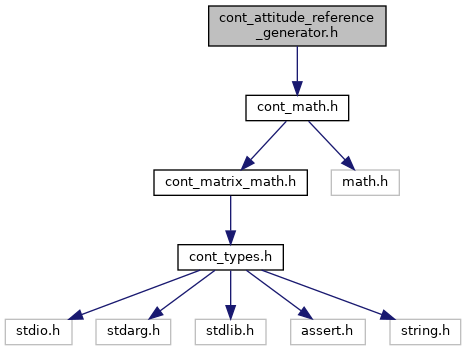
Go to the source code of this file.
Functions | |
| int | update_attitude_references (matrix_double_t *commands, matrix_double_t *filterMemory, ref_state_qw_t *reference, double h) |
| Update the reference trajectory based on input commands. More... | |
Function Documentation
◆ update_attitude_references()
| int update_attitude_references | ( | matrix_double_t * | commands, |
| matrix_double_t * | filterMemory, | ||
| ref_state_qw_t * | reference, | ||
| double | h | ||
| ) |
Update the reference trajectory based on input commands.
This function computes a set of references of the attitude control from a set of commands in anlges r, t and s. These angles are filtered through a critically damped second order system to yield smooth reference signals. Let
q_{p} = exp([p, 0, 0]^hat/2) = [ cos(p/2), sin(p/2), 0, 0]'
q_{t} = exp([0, t, 0]^hat/2) = [ cos(t/2), 0, sin(t/2), 0]' (1)
q_{s} = exp([0, 0, s]^hat/2) = [ cos(s/2), 0, 0, sin(t/2)]'
and take
q = q_{p} * q_{t} * q_{s} (2)
where then
dq = + dq_{p} * q_{t} * q_{s}
+ q_{p} * dq_{t} * q_{s} (3)
+ q_{p} * q_{t} * dq_{s}
and
ddq = + ddq_{p} * q_{t} * q_{s}
+ q_{p} * ddq_{t} * q_{s}
+ q_{p} * q_{t} * ddq_{s} (4)
+ 2 * (dq_{p} * dq_{t} * q_{s})
+ 2 * (dq_{p} * q_{t} * dq_{s})
+ 2 * ( q_{p} * dq_{t} * dq_{s})
From these objects, the attitude rate can be computed through the kinematics
dq = q * [w]^{hat} / 2 (5)
The attitude rates can be computed as
w = 2 * [conj(q) * dq]^{vee} (6)
And since
ddq = (dq * [w]^{hat} + q * [a]^{hat}) / 2, (7)
the atittude accelerations can be computed through
a = [conj(q) * (2*ddq - dq * [w]^{hat})]^{vee}, (8)
For the filtering of the inputs, we consider a second order critically damped system with a double pole in -p, characterized by the LTI system
dx(t) = A*x(t) + B*u(t) (9)
where
A = [ 0, 1, 0] B = [ 0]
[ 0, 0, 1] [ 0]
[ -p^3, -3p^2, -3p] [ p^3]
when discretized usign zero order hold at a time-step of h, we obtain
x(k+h) = A(h;p)*x(k) + B(h;p)*u(k), (10)
were
A(h;p) = [ (exp(-h*p)*(h^2*p^2 + 2*h*p + 2))/2, h*exp(-h*p)*(h*p + 1), (h^2*exp(-h*p))/2]
[ -(h^2*p^3*exp(-h*p))/2, exp(-h*p)*(- h^2*p^2 + h*p + 1), -(h*exp(-h*p)*(h*p - 2))/2]
[ (h*p^3*exp(-h*p)*(h*p - 2))/2, h*p^2*exp(-h*p)*(h*p - 3), (exp(-h*p)*(h^2*p^2 - 4*h*p + 2))/2]
B(h;p) = [ -(exp(-h*p)*(2*h*p - 2*exp(h*p) + h^2*p^2 + 2))/2]
[ (h^2*p^3*exp(-h*p))/2]
[ -(h*p^3*exp(-h*p)*(h*p - 2))/2]
For this system, the positional states y = [1, 0, 0]x are bound to the domain of the input u, and the magnitude of the velocities and accelerations are given by the pole location p, being greater for faster dynamics (larger p).
In this implementation, we take the signals r s t and f to be configured on rectangular intervals r in [-r0, r0], use the second order dynamics in (9) to generate smooth reference trajectotries in the filter memory "mem", as
mem = (r, dr, ddr, s, ds, dds, t, dt, ddt, d, df, ddf)
which are subsequently converted to a refeence quaternion and attitude rates through equations (1)-(8). The commended force is given in the global z-direction such that the default (r, s, t, f) = (0, 0, 0, 0) results in a stable hovering state, and that an excitation of the angles at a force command of f = 0 will keep the system at roughly the same height.
- Parameters
-
[in] commands - The desired commands in normalized angles and thrust [in] filterMemory - The memory of the filter (gets updated) [in] reference - The desired normalized thrust on an interval [-1,1] [in] h - The time-step between updates in the reference gen.
- Returns
- status - 1 if successful, 0 otherwise.
Definition at line 10 of file cont_attitude_reference_generator.c.
