#include "cont_math.h"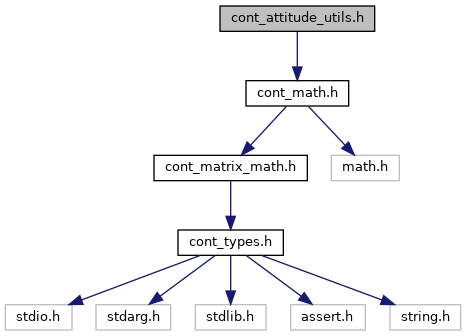
Go to the source code of this file.
Functions | |
| int | assert_attitude_FSF_SO3 (con_state_qw_fsf_t *controller) |
| Assert that the SO(3) controller is feasible. More... | |
| int | assert_attitude_FSF_SU2 (con_state_qw_fsf_t *controller) |
| Assert that the SU(2) controller is feasible. More... | |
| int | assert_attitude_FSF_parameters (con_state_qw_fsf_t *controller, double *minJ, double *maxJ) |
| Assert that the FSF allitude controller parameters are feaible. More... | |
Function Documentation
◆ assert_attitude_FSF_parameters()
| int assert_attitude_FSF_parameters | ( | con_state_qw_fsf_t * | controller, |
| double * | minJ, | ||
| double * | maxJ | ||
| ) |
Assert that the FSF allitude controller parameters are feaible.
Here, the maximum and minimum eigenvalues of the inertia matrx can potentially be computed on startup if the inertia matrix is constant in time. This would avoid the need for implementing an eigenvalue decomposition (currently done by using LAPACK).
- Parameters
-
[in] controller - State of the controller [out] *minJ - Output minimum eigenvalue of the inertia matrix [out] *maxJ - Output maximum eigenvalue of the inertia matrix
- Returns
- status - 1 if feasible, 0 otherwise.
Definition at line 60 of file cont_attitude_utils.c.
◆ assert_attitude_FSF_SO3()
| int assert_attitude_FSF_SO3 | ( | con_state_qw_fsf_t * | controller | ) |
Assert that the SO(3) controller is feasible.
This function should be run any time that the controller parameters are changed, but may also be called on each time-step as a precauiton.
- Parameters
-
[in] controller - State of the controller
- Returns
- status - 1 if feasible, 0 otherwise.
Definition at line 10 of file cont_attitude_utils.c.
◆ assert_attitude_FSF_SU2()
| int assert_attitude_FSF_SU2 | ( | con_state_qw_fsf_t * | controller | ) |
Assert that the SU(2) controller is feasible.
This function should be run any time that the controller parameters are changed, but may also be called on each time-step as a precauiton.
- Parameters
-
[in] controller - State of the controller
- Returns
- status - 1 if feasible, 0 otherwise.
Definition at line 35 of file cont_attitude_utils.c.
