cont_power_distribution.h File Reference
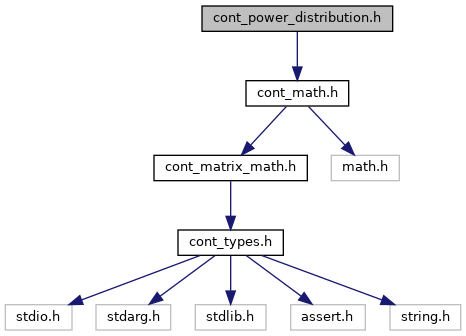
#include "cont_math.h"
Include dependency graph for cont_power_distribution.h:
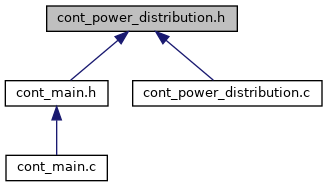
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| int | compute_power_distribution (con_state_qw_fsf_t *controller, matrix_double_t *dutyCycles) |
| Compute the desired rotor thrusts. More... | |
Function Documentation
◆ compute_power_distribution()
| int compute_power_distribution | ( | con_state_qw_fsf_t * | controller, |
| matrix_double_t * | dutyCycles | ||
| ) |
Compute the desired rotor thrusts.
This function assumes a linear relationship between the rotor thrusts and the rigid-body forces and torques as
|f | | +1, +1, +1, +1| |f1| |t1| | 0, -d, 0, +d| |f2| |t2| = | +d, 0, -d, 0| |f3| |t3| | -c, +c, -c, +c| |f4|
This map is subsequently inverted, as
|f1| | 1, 0, 2/d, -1/c| |f | |f2| | 1, -2/d, 0, +1/c| |t1| |f3| = (1/4) | 1, 0, -2/d, -1/c| |t2| |f4| | 1, +2/d, 0, +1/c| |t3|
These forces should be positive at all times, and are therefore converted to a duty-cycle for each of the rotors using a polynomial approximation of the duty cycle to thrust map, identified offline. In general, this map can be well approximated with second order polynomials which are zero at the origin. Consequently, we assume that
fi = h(di) = a * di + b * di^2
and the inverse map is then taken as
di = g(fi) = -(a/(2*b)) + sqrt((a/(2*b))^2 + fi/b) > 0 for all fi > 0
- Parameters
-
[in] controller - The current controller state [out] dutyCycles - The corresponding cycles thfor the rotor control
- Returns
- status - 1 if successful, 0 otherwise.
Definition at line 10 of file cont_power_distribution.c.
